
I am a computer science PhD candidate advised by Professor George Konidaris in the Intelligent Robot Lab at Brown University. I am also fortunate to have done research at Boston Dynamics Robotics and AI Institute.
My research bridges language, perception, and robotics to develop instruction-following systems that improve with experience. I currently focus on methods that equip robots with general-purpose intelligence—enabling them to interpret open-ended instructions, build predictive models, and tackle multiple tasks in unstructured environments.
Updates
- [08 / 2025] Gave a keynote talk and participated in an expert panel discussion at Robotics & Automation in Africa 2025 on foundation models in robotics and scaling trusted autonomy.
- [02 / 2025] 2 papers accepted! Works on leveraging foundations models for robot planning accepted to ICRA 2025
- [06 / 2024] Started a research scientist internshp at the Boston Dynamics Robotics and AI Institute in Cambridge!
- [05 / 2024] Awarded the Joukowsky Presidential Fellowship at Brown University
- [01 / 2024] Serving as an organizer and chair of Faculty Engagement at the 2024 Deep Learning Indaba in Dakar, Senegal
- [10 / 2023] 1 paper accepted! Presented TaskExplore at NeurIPS 2023 Generalization in Planning Workshop
- [09 / 2023] Gave a lecture on "Robot Instruction Understanding and Generalization" at Ashesi University in Ghana
- [05 / 2023] Advanced to candidacy. Commitee: George Konidaris , Stefanie Tellex , Michael Littman
- [08 / 2022] Designed and taught an Artificial Intelligence summer course at Brown University
- [08 / 2021] Started CS Ph.D at Brown University advised by George Konidaris
- [2020 - 2021] Founding R&D engineer at one of the first startups to apply NLP and conversational AI to Fintech in Africa. Developed speech-driven banking technology for low-resource languages and secured deployment partnership with major pan-african bank Ecobank
- [03 / 2019] Delivered a keynote talk at the Saint-Étienne International Design Biennale on democratizing autonomous vehicle research.
- [2018] Short stint working on algorithimic trading and smart order routing engines at Merrill Lynch in London
Research
 Verifiably Following Complex Robot Instructions with Foundation Models
Verifiably Following Complex Robot Instructions with Foundation Models
Benedict Quartey*,
Eric Rosen*,
Stefanie Tellex,
George Konidaris
NERC '24 (Oral), ICRA 2025, TAMP@ICRA '25 (Best Paper Finalist)
Website •
Paper
•
Poster
•
Thread
TL;DR: A novel approach that enables robots to verifiably follow expressive and complex open-ended mobile manipulation instructions in real-world environments without prebuilt semantic maps.
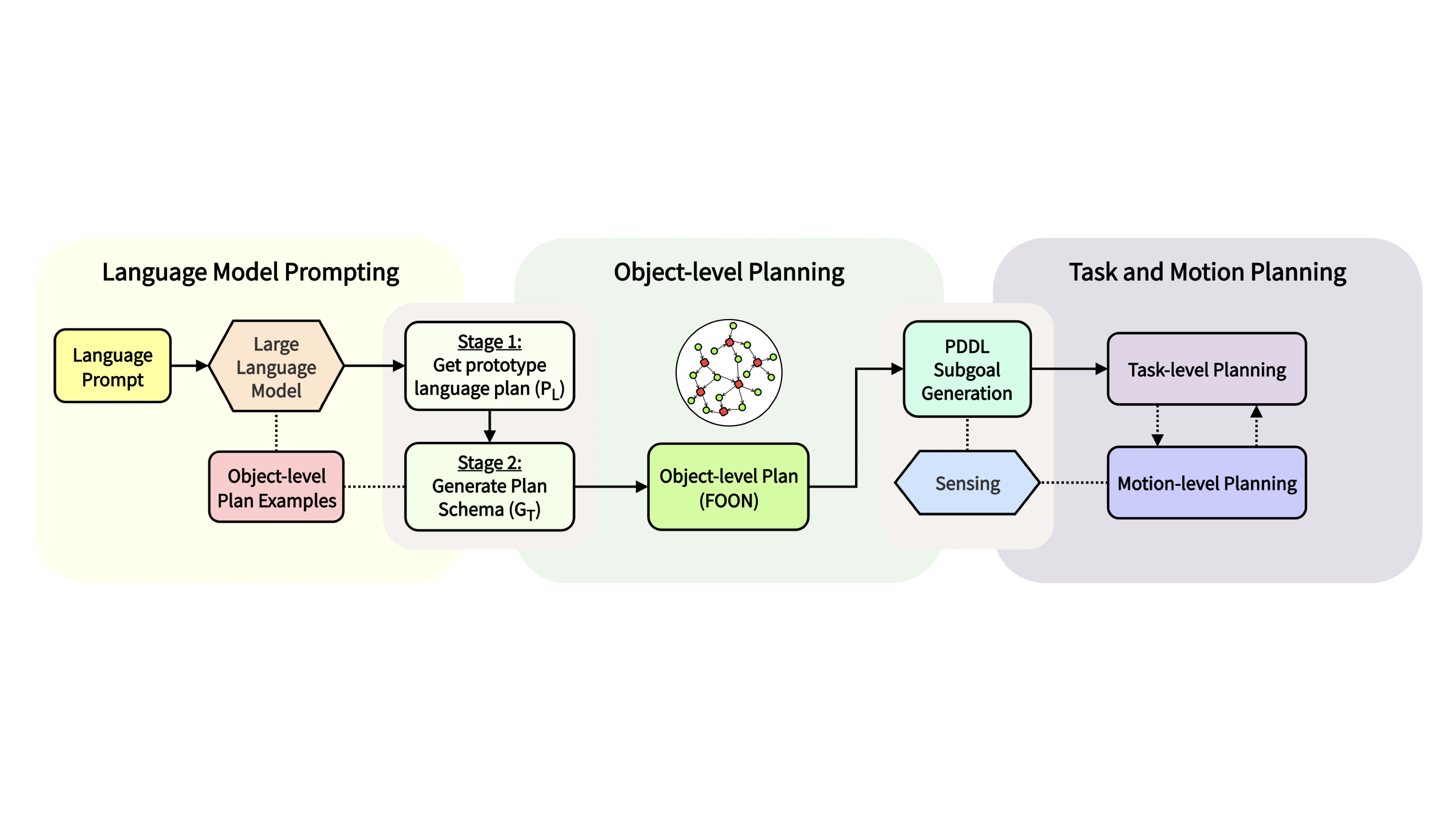 Bootstrapping Object Level Planning with Large Language Models
Bootstrapping Object Level Planning with Large Language Models
David Paulius,
Alejandro Agostini,
Benedict Quartey,
George Konidaris
AAAI Workshop on Generalization in Planning (Spotlight Paper), ICRA 2025
Paper •
TL;DR: We use LLMs to extract object-level plan schemas as functional object-oriented networks (FOON), which are then converted into PDDL subgoals for hierarchical task and motion planning.
 TaskExplore: Exploiting Contextual Structure to Generate Useful Auxiliary Tasks
TaskExplore: Exploiting Contextual Structure to Generate Useful Auxiliary Tasks
Benedict Quartey,
Ankit Shah,
George Konidaris
NeurIPS Workshop on Generalization in Planning, December 2023
Paper •
Extended Poster
TL;DR: A framework for multi-task learning that enables off-policy reinforcement learning agents to maximally reuse experience collected while training on single long-horizon tasks.
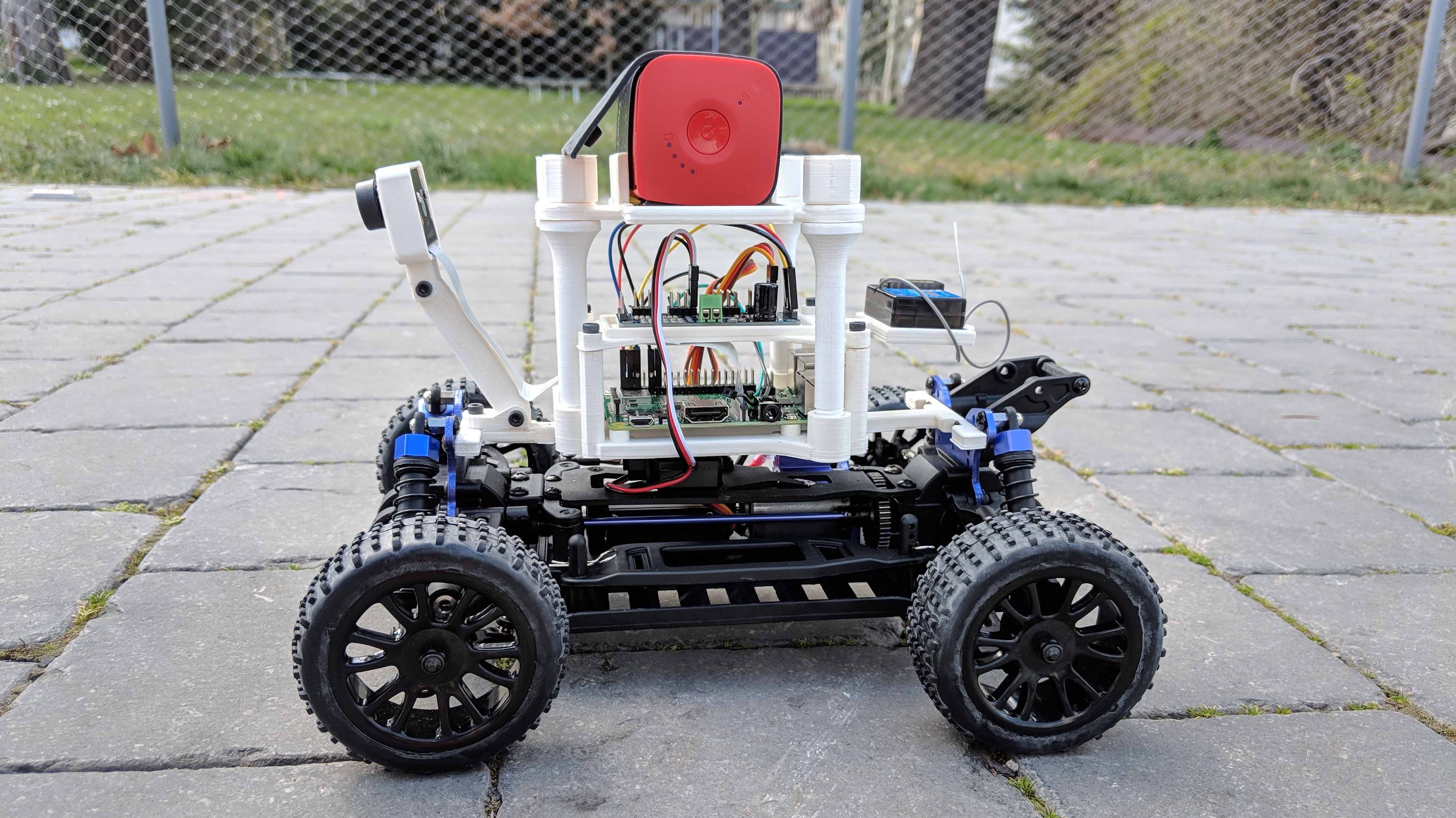 Affordable Modular Autonomous Vehicle Development Platform
Affordable Modular Autonomous Vehicle Development Platform
Benedict Quartey,
Ayorkor
Korsah
IEEE 7th International Conference on Adaptive Science & Technology (ICAST), 2018
Keynote Talk @ 2019 Saint-Étienne International Design Biennale.
Blog •
Paper •
IEEE •
Talk •
Code •
Press
TL;DR: RollE is a low-cost, modular platform designed to democratize autonomous vehicle research. It gained traction among African researchers and served as the test platform for a local government-backed climate data collection initiative at the Cité du Design institute in France. In 2019, it was exhibited at the curated Saint-Étienne International Design Biennale
Teaching & Talks
- August 2025: Foundation Models in Robotics and Scaling Trusted Autonomy Keynote @ Robotics & Automation in Africa 2025
- September 2024: Verifiably Following Complex Robot Instructions with Foundation Models Talk @ 2024 Northeast Robotics Colloquium
- November 2023: Unsupervised Machine Learning Lecture series @ Brown University, CSCI 1410 (Artificial Intelligence)
- September 2023: Robot Instruction Understanding and Generalization Lecture @ Ashesi University, CS 453 (Robotics)
- Summer 2022 & Summer 2023: Instructor for Artificial Intelligence: A Computational Account of Intelligence (CECS 0915)
Special thanks to Cheng Chi for an awesome website template!